



Kategorie Innovation & Technologie - 20. November 2018
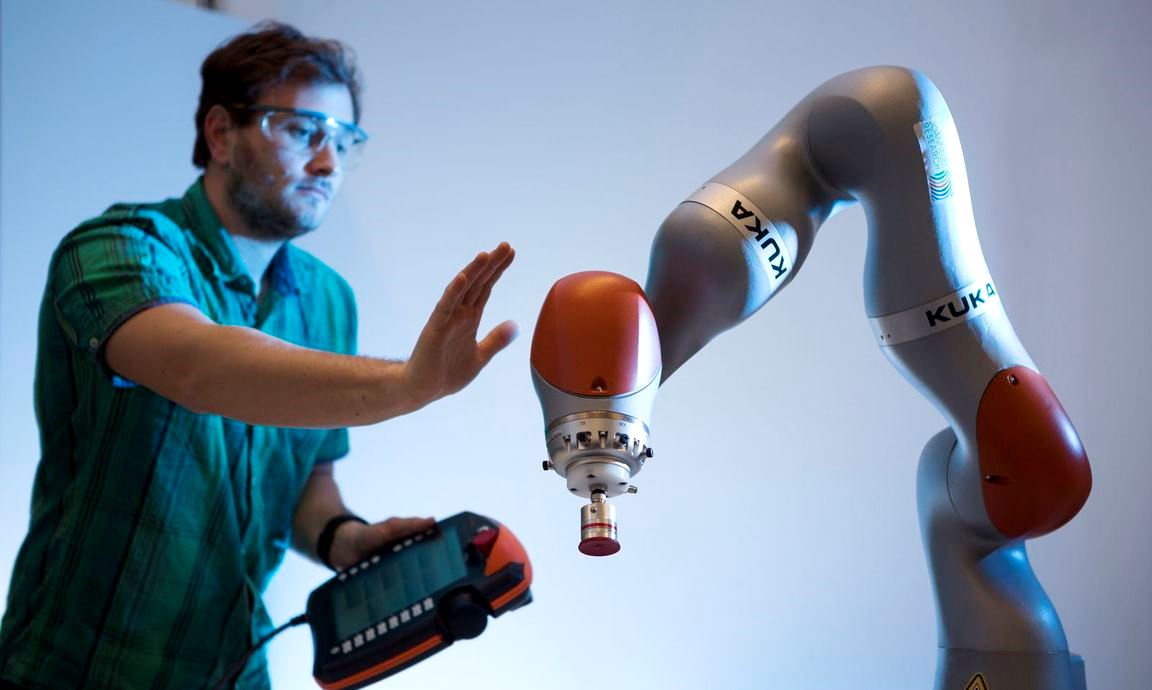
Robotik: Vertrauen zur Maschine fassen
Von Lisbeth Legat
Etwa zwei Millionen Industrieroboter sind derzeit weltweit im Einsatz. Bis 2020 sollen es circa drei Millionen sein. Das Robotics-Institut der Joanneum Research Forschungsgesellschaft in Klagenfurt beschäftigt sich intensiv mit den Möglichkeiten der Zusammenarbeit von Mensch und Roboter – hauptsächlich, aber nicht nur – im Industriebereich.
„Die wichtigste Grundvoraussetzung für eine solche Kollaboration ist, die Sicherheit des Menschen zu gewährleisten. Das heißt, der Roboter, meist geht es hier um Greifarme, muss so programmiert sein, dass er seine Umgebung nicht nur sensorisch erfassen, sondern auch dementsprechend auf sie reagieren kann“, erläutert Institutsleiter Michael Hofbaur. Das Thema ist ein äußerst komplexes, da es letztlich auch die Wirtschaftlichkeit einer Mensch-Roboter-Kollaboration umfasst.


„Wenn ein Roboter neben oder mit Menschen arbeitet, muss sich das auch wirtschaftlich rechnen – und da beginnen dann oft die Schwierigkeiten, denn es gibt einen sehr strikten Normenrahmen, was die Sicherheit betrifft. Das kann aber zum Beispiel bedeuten, dass ein Roboter wesentlich langsamer arbeiten muss, als es eigentlich möglich wäre“, erklärt Hofbaur einen Teil der Problematik.
Schwer zu stoppende Riesen
Das größte Problem im Industriebereich sei, einen Roboter rechtzeitig zu stoppen. „Das ist eine durchaus herausfordernde Aufgabe für einen schweren Industrieroboter, da man ja die Gesetze der Physik nicht außer Kraft setzen kann.“ Einen Roboter näher als einen halben Meter an einen Menschen heranzulassen, ist schwierig. Die installierten Kameras arbeiten meist nur bei größeren Distanzen zuverlässig.
Die Forschungstätigkeit von Hofbaurs Team nimmt aber auch das Umfeld in den Blick. „Um eine Zusammenarbeit mit dem Menschen zu ermöglichen oder zu erleichtern, kann man sich etwa überlegen, wie die Arbeitsabläufe sind, wie das Werkzeug, mit dem der Roboter arbeitet, ausschaut, wie Werkstücke gehalten werden oder ob man die Bewegungen der Maschine ändern soll“, sagt Hofbaur.
Dass sich hier in den vergangenen Jahren viel getan hat, ist unbestritten. „Lange Zeit waren etwa Zwei-Finger-Greifer nicht sicher. Heute kann man sie so programmieren, dass genau definiert werden kann, was sie ergreifen müssen und selbst bemerken, wenn sie etwas Falsches in der Hand haben. Man muss immer bedenken, dass ein Roboter seine Aufgabe überwiegend blind ausführen muss“, so Hofbaur über die Fortschritte in dem Feld.
Am Klagenfurter Institut beschäftigen sich die Forscher zudem mit Leichtbaurobotern. Ihr Vorteil ist, wie schon ihr Name verrät, dass sie nicht mehr so schwer und die Gelenkverbindungen nicht mehr so starr wie bei herkömmlichen Robotern sind. Ihr Nachteil – sie arbeiten nicht ganz so präzise – wird durch die Regelungstechnik kompensiert. Hofbaur: „Durch diese Bauweise kann man dem Roboter auch neue Aufgaben übertragen, wie die Manipulation mit weichen Bauteilen, etwa Schläuchen, oder man kann ihn auch etwas polieren lassen.“
Der nächste Schritt ist die Entwicklung eines Roboterarms auf einem mobilen Roboter. „Das brächte mehr Flexibilität, der Roboter könnte dann seinen Arbeitsplatz wechseln, Hilfsdienste ausführen, etwa Bauteile zum Arbeitsplatz bringen oder den Arbeitsplatz sauber halten“, denkt Hofbaur weiter. „Die größte Schwierigkeit ist und bleibt aber der physische Kontakt zwischen Roboter und Mensch.“