



Kategorie Innovation & Technologie - 22. März 2022
Robuster Radar: Neue KI-Sensortechnologie für autonomes Fahren
Forschende der TU Graz modellierten ein KI-System für Automotive-Radarsensoren, das Störsignale, verursacht durch andere Radarsensoren, filtert und die Objekterkennung dramatisch verbessert. Nun soll das System robuster gemacht werden gegenüber Wetter- und Umwelteinflüssen sowie neuartigen Störungen.

Damit Fahrassistenz- und Sicherheitssysteme moderner Autos ihre Umgebung wahrnehmen und in allen denkbaren Situationen zuverlässig funktionieren, sind sie auf Sensoren wie Kameras, Lidar, Ultraschall und Radar angewiesen. Vor allem letztere sind ein unverzichtbarer Bestandteil: Radarsensoren versorgen das Fahrzeug mit Standort- und Geschwindigkeitsinformationen von umliegenden Objekten. Allerdings haben sie es im Verkehrsgeschehen mit zahlreichen Stör- und Umwelteinflüssen zu tun: Interferenzen durch andere (Radar)-Geräte und extreme Witterungsbedingungen erzeugen ein Rauschen, das die Qualität der Radarmessung negativ beeinflusst.
„Je besser das Entrauschen von Störsignalen funktioniert, desto zuverlässiger kann die Position und die Geschwindigkeit von Objekten bestimmt werden“, erklärt Franz Pernkopf vom Institut für Signalverarbeitung und Sprachkommunikation. Gemeinsam mit seinem Team und mit Partnern von Infineon entwickelte er ein KI-System auf Basis neuronaler Netzwerke, das gegenseitige Interferenzen bei Radarsignalen abschwächt und dabei den derzeitigen Stand der Technik bei Weitem übertrifft. Dieses Modell wollen sie nun soweit optimieren, damit es auch abseits gelernter Muster funktioniert und Objekte noch zuverlässiger erkennt.
Ressourceneffiziente & intelligente Signalverarbeitung
Die Forschenden haben dafür zunächst Modellarchitekturen zur automatischen Rauschunterdrückung entwickelt, die auf sogenannten gefalteten neuronalen Netzwerken (Convolutional Neural Networks, kurz: CNNs) beruhen. „Diese Architekturen sind der Schichtenhierarchie unseres visuellen Kortex nachempfunden und werden bereits erfolgreich in der Bild- und Signalverarbeitung eingesetzt“, so Pernkopf.
CNNs filtern visuelle Informationen, erkennen Zusammenhänge und vervollständigen das Bild anhand vertrauter Muster. Sie verbrauchen durch ihren Aufbau wesentlich weniger Speicherplatz als andere neuronale Netzwerke, sprengen aber trotzdem die verfügbaren Kapazitäten von Radarsensoren für autonomes Fahren.
Komprimierte KI im Chipformat
Das Ziel lautete also: noch effizienter werden. Das Team der TU Graz trainierte daher verschiedene dieser neuronalen Netzwerke mit verrauschten Daten und gewünschten Ausgangswerten. Dabei identifizierten sie in Experimenten besonders kleine und schnelle Modellarchitekturen, in dem sie den Speicherplatz und die Anzahl an Rechenoperationen analysierten, die es pro Entrauschungsvorgang braucht.
Die effizientesten Modelle wurden anschließend erneut komprimiert, indem die Bitbreiten, also die Anzahl der verwendeten Bits zur Speicherung der Modellparameter, reduziert wurden. Resultat war ein KI-Modell mit hoher Filterleistung bei gleichzeitig geringem Energieverbrauch. Die hervorragenden Entrauschungsergebnisse mit einem F1-Score (Maß für die Genauigkeit eines Tests) von 89 Prozent, entsprechen beinahe einer Objekterkennungsrate von ungestörten Radarsignalen. Die Störsignale werden also beinahe gänzlich aus dem Messsignal entfernt.
In Zahlen ausgedrückt: Das Modell erreicht mit einer Bitbreite von 8 Bit die gleiche Performance wie vergleichbare Modelle mit einer Bitbreite von 32 Bit, benötigt aber lediglich 218 Kilobytes Speicherplatz. Das entspricht einer Speicherplatzreduktion von 75 Prozent, womit das Modell den derzeitigen Stand der Technik bei Weitem übertrifft.
Robustheit & Erklärbarkeit im Fokus
Im FFG-Projekt „REPAIR“ (Robust and ExPlainable AI for Radarsensors“) arbeiten Pernkopf und sein Team nun gemeinsam mit Infineon in den nächsten drei Jahren an der Optimierung ihrer Entwicklung. Pernkopf dazu: „Für unsere erfolgreichen Tests nutzten wir ähnliche Daten (Störsignale, Anm.), die wir zum Trainieren verwendet hatten. Wir wollen das Modell nun derart verbessern, dass es auch dann noch funktioniert, wenn das Eingangssignal signifikant von gelernten Mustern abweicht.“ Das würde Radarsensoren um ein Vielfaches robuster gegen Störungen aus der Umgebung machen. Schließlich ist der Sensor auch in der Realität mit verschiedenen, teils auch unbekannten Situationen konfrontiert. „Bisher reichten schon kleinste Veränderungen der Messdaten aus, dass der Output zusammenbrach und Objekte nicht oder falsch erkannt wurden, was im Anwendungsfall autonomes Fahren verheerend wäre.“
Wie ein Sinnesorgan für Automatisierte Fahrzeuge entwickelt wird
Licht in die Blackbox bringen
Das System muss mit solchen Herausforderungen zurechtkommen und merken, wann die eigenen Vorhersagen unsicher sind. Dann könnte beispielsweise mit einer gesicherten Notfallsroutine darauf reagiert werden. Hierzu wollen die Forschenden herausfinden, wie das System Vorhersagen bestimmt und welche Einflussfaktoren dafür entscheidend sind. Dieser komplexe Vorgang innerhalb des Netzwerks war bislang nur beschränkt nachvollziehbar. Hierzu wird die komplizierte Modellarchitektur in ein lineares Modell übertragen und vereinfacht. In Pernkopfs Worten: „Wir wollen das Verhalten von CNNs ein Stück weit erklärbarer machen. Uns interessiert nicht nur das ausgegebene Ergebnis, sondern auch dessen Schwankungsbreite. Je kleiner die Varianz, desto sicherer ist sich das Netzwerk.“
So oder so: Für den Realeinsatz ist noch einiges zu tun. Pernkopf rechnet damit, dass die Technologie in den nächsten Jahren so weit entwickelt sein wird, dass die ersten Radarsensoren damit ausgestattet werden können.
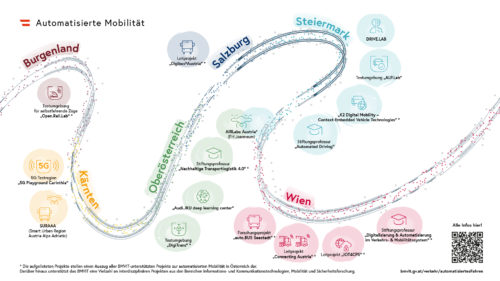
Das Aktionspaket Automatisierte Mobilität
Was uns morgen durch den Alltag begleiten soll, wird auch vom Bundesministerium für Klimaschutz, Umwelt, Energie, Mobilität, Innovation und Technologie (BMK) sorgfältig beobachtet. Es fördert mit vielfältigen Projekten im Bereich automatisierter und vernetzter Fahrzeuge Mobilität in all ihren Facetten.
„Automatisierte Mobilität ist ein Teil der Mobilität der Zukunft“, so Michael Nikowitz, Koordinator für Automatisiertes Fahren im BMK. Gemeinsam mit der Elektrifizierung, der gemeinsamen Nutzung und der Vernetzung stellt sie so eine der wichtigen Säulen auf diesem Gebiet. Seit 2016 beschäftigt sich das BMKintensiv mit dieser Thematik. Der unglaublich rasche Technologiefortschritt bedarf hierbei ebenso schneller Reaktionen auch von Seiten der öffentlichen Hand. „Es ist ganz essentiell, dass wir uns mit der Thematik möglichst breit und interdisziplinär beschäftigen, um sicherzustellen, dass wir als Ministerium die richtigen Fragestellungen und Themen adressieren“, so Nikowitz weiter.
Die Austria Tech ist die Kontaktstelle zum Automatisierten Fahren des BMK. Gemeinsam hat man das Aktionspaket Automatisierte Mobilität sowie das Forum Automatisierte Mobilität ins Leben gerufen, einem jährlichen Symposium, welches die Entwicklung automatisierter Mobilität bestmöglich abbilden und als Dialogveranstaltung dienen soll, um von allen Akteuren von der Industrie, über Verwaltung und Wissenschaft bis zu Start-ups sowohl den neuesten Stand zu bekommen als auch kritisches Hinterfragen der Entwicklungen zu ermöglichen, wie Nikowitz betont.
Für ihn ist ein transparenter und objektiver Wissensaustausch unumgänglich, damit im Falle der Automatisierung nicht vergeblich an der Entwicklung von Lösungen gearbeitet und erst im Nachhinein erkannt wird, dass Best-Practice-Beispiele bereits verfügbar gewesen wären.
Neue automatisierte Mobilitäts-Services gelten als eine der Tech-Revolutionen im 21. Jahrhundert, die neben anderen Zweigen fortschreitender Digitalisierung von großem Einfluß auf unseren Alltag sein wird. Entwicklungen auf dem Gebiet der automatisierten Mobilität – seien es Assistenzsysteme in privaten Pkw, sogenannte Robo-Taxis oder fahrerlose öffentliche Verkehrsmittel werden unsere Mobilität und die Möglichkeiten des [Vor]Ankommens in Städten und auch im ländlichen Raum stark verändern.
Aktionspaket Automatisierte Mobilität